
Portfolio Details
Line Following Robot
- Title: Line Following Robot
- Time Required: < 1.5 hour
- Project URL: github
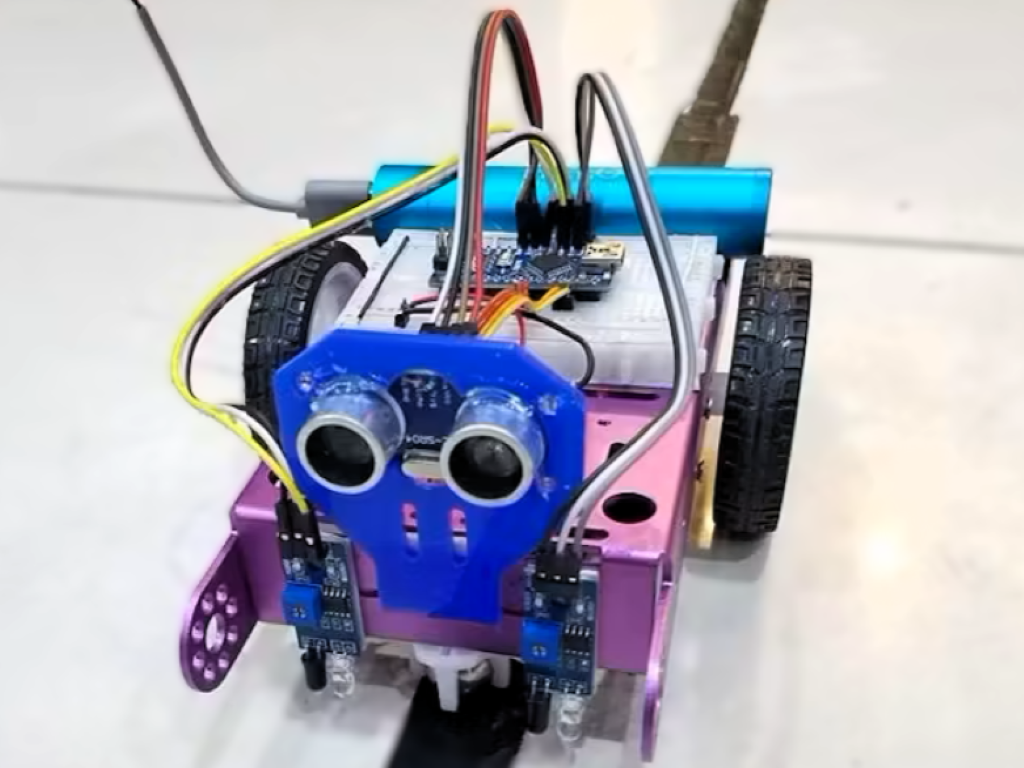
The Line-Following Robot is an autonomous vehicle that uses sensors and efficient components to follow a designated path. Powered by an Arduino Nano, the robot is controlled through an L298N motor driver and operates on two 3.7V Li-ion batteries for reliable power. It features two IR sensors that detect and track the line, ensuring smooth navigation along the path.
Equipped with an ultrasonic sensor for obstacle detection, the robot can avoid disruptions in its path. Built on a breadboard with a Redimate frame, it serves as an ideal platform for exploring robotics, line-following algorithms, and automation.